If you wanted to be grossly unfair, you might compare BLOODHOUND with a sort of supersonic railway locomotive.
Okay, it has to be said that at this time there may not be a huge market for same. Use BLOODHOUND on the Chiltern Line from Aylesbury to Marylebone and yes, it would do the trip in 2 min 20 secs as opposed to an hour. But there is undeniably the odd downside – such as frying the coaches in the jet and rocket blast, tending to slightly catch up with the trains in front, knocking down half of Harrow and Neasden with the shockwave, and going straight through historic Marylebone station and ending up in Wapping if the brake-chutes fail. Not, let us admit, exactly great sales points.
But BLOODHOUND nonetheless does have a little bit in common with every railway engine going back to Stephenson’s Rocket.
Or maybe not altogether true.
Quite obviously it comes down to the wheels. Equally obviously rubber tyres or anything like them are a non-starter because they would fly apart at somewhere around half of the projected maximum speed. So you have to have solid wheels (see Brian Coombs’ summary in The Wheel Story So Far). And these wheels have a flange (or what BLOODHOUND call a keel) in the middle of the wheel footprint, the principle being that the wheel rim carries the weight of the car while the keel (or keels, because the wheels might end up being double-keeled) cuts slightly into the desert playa to assist directional control.
It says here. In fact nobody expects the keels to be a magic directional bullet. As experience shows……
Which gives rise to some interesting conundrums – plus a ghost from the past. We’ll come to that.
Firstly, what produces cornering force? In a road car, obviously you steer the front wheels and the car follows them, building up lateral G in the process. The amount of lateral G you can whack on is a function of the grip of the tyres on the road. This grip is affected by a zillion other factors – road surface, tyre-mix and size, suspension geometry, axle loads, the aspect-ratio of your wallet, you name it. A hot-stuff road-going sports car might be able to produce 1 G laterally. In other words, if it weighs a ton it can take a cornering force of a ton without splattering itself into the scenery – or more realistically, it can theoretically do so, so long as the surface is dry and perfect and the driver don’t do nothing dumb.
Formula One cars with sticky tyres will do better – lateral G of 1.5 or even more. Of course you’re now looking all-knowing and about to tell me that they can actually get up to 5.5 lateral G – which indeed they can. And the reason they can is aerodynamic down-force from all the inverted wings they have about their persons. Use aerodynamic loads to triple the weight of a 600 kg F1 car at x mph, and 1.5 lateral G becomes a ‘real’ 4.5 G cornering force. The slight snag is that making the car effectively heavier at speed obviously also has a somewhat saddening affect on its acceleration and top speed. So the whole deal is always a compromise – if you’ve got a fast circuit with lots of straights you want less down-force, but if it’s a very bendy circuit you want more. The – literally – million-dollar question is how much less or more, and finding the answers keeps a remarkably large cadre of F1 aerodynamicists in caviar and fish and chips.
BLOODHOUND is a slightly different ball-game. Reaction to any given side-force increases not directly in line with speed but with velocity-squared. F1 cars – and even a handful of high-aspect-wallet road supercars – are looking at speeds of up to 200 mph. Multiply 200 mph by five times-squared and you get a bit of a different emphasis…
BLOODHOUND is basically a long, thin javelin with a few inevitable warts on it – such warts including the wheels, the cockpit, the jet intake, etc. It is designed to achieve a great many things – but one thing it is NOT designed to do is hurl itself round bends on an F1 circuit. The car is 13 metres long, the front wheels are less than 1 metre apart, and the rear wheel track less than 2 metres. This in itself is hardly inherently super-stable, and to top it off the last thing you want to do is zap up the aerodynamic down-force for fear of overloading the suspension or – worst of all – creating a big imbalance of down-force from front to rear. We’ll come back to that, too.
Okay, so BLOODHOUND isn’t designed to go round corners – but by a grand engineering irony, BLOODHOUND’s wheels could theoretically be designed to produce…. well, whatever cornering force you want, within reason. On a race-circuit it could conceivably be frowned upon to use solid wheels with a keel digging into the concrete – if the F1 rules don’t have a clause forbidding that then they’re definitely losing their touch – but BLOODHOUND, on a playa surface, does exactly that, particularly at the lower end of the speed range. So simply increasing the depth of the keel should increase the grip and therefore the lateral G capability…
It says here. But there is a maybe. A big maybe. Again, please wait – we’ll come to it.
And anyway, unlike F1, you don’t necessarily want more grip.
Well – you do up to a point, of course, because A Green does have to steer the thing. But you certainly don’t want too much of it.
The three threats
There are obviously a thousand threats to the safety of any Land Speed Record car. But the three primary ones are unchanging. They are lifting off the ground, burrowing into the ground, or rolling over. Apply too much cornering force – lateral G – to BLOODHOUND, and it will roll over. The centre of gravity is higher than most road cars and way higher than an F1 racer, so give it too much wheel-grip in a bend at, say, 800 mph on the Hakskeen Pan, and it will tip over and roll. And finish rolling maybe somewhere near Durban, or perhaps Madagascar. Which might well damage it a bit, and possibly not improve the condition of A Green along the way.
So you don’t want too much grip. You want enough to control it – but not enough to start it rolling over. You need to calculate how much lateral G BLOODHOUND can take without rolling, and then design the keel(s) on your wheels to have slightly less grip than that, so that (in my simplistic terms) it will tend to skid rather than dig in and roll. A seriously skidding BLOODHOUND at 700 or 1,000 mph would undoubtedly grab everybody’s attention – but is much preferable to a rolling BLOODHOUND at the same speeds.
BLOODHOUND scientists, therefore, have to calculate how much lateral G – cornering force – BLOODHOUND should be capable of before it starts to roll. And then apply a safety factor. Sounds a relatively simple mathematical problem when you say it quickly…
Not simple. Not simple at all.
Not least because you have to decide where ground-steering tapers off, to be replaced by aerodynamic steering. This is the speed where the aerodynamic forces generated by the front wheels – just the little-bitty arcs of the front wheels exposed to the airflow under the javelin – become more powerful than the physical grip of the wheels on the desert. This won’t ‘maybe’ happen – it will happen, and from that speed on you could possibly say that the thing is in a sort of permanent skid anyway.
I’ll correct that last statement. Delete the word ‘speed’ and replace it with ‘speed-range’, because this is not a snap-of-the-fingers happenstance passing any one magic speed figure. There is no such word as ‘gradual’ relating to a BLOODHOUND run, but the transition from ground-grip to airflow will happen progressively, not instantaneously, as the speed rises. Quite slowly, really, in BLOODHOUND terms. Maybe even as long as five seconds……
Which makes it a very highly complex calculation with – inevitably – a certain amount of ‘if’s’ sprinkled on top. Part of the engineering challenge, are those ‘if’s’…
But it doesn’t change everything. This is a straight-line car, so we’re not talking about wanting to go round bends – we’re talking about an inadvertent deviation from a straight line which needs correcting. Normal mortals might call it an ‘Oops!’ And so you come to the conclusion (say) that designing for a half-a-G side-force (0.5 G) – if things go a bit pear-shaped and you need it for correction – is about right. Add in a safety margin of more than 1.5 and opt for 0.8 sideways G before it starts to roll. Not exactly F1 territory, but it does mean Andy Green can steer a 0.8 G correction without the car rolling over, which is a huge capability by LSR car standards.
So that’s that, right? NOT a simple calculation, but you’ve identified the issue and added a safety-factor of more than 1.5…
Or have you?
Enter a spectre from more than 12 years ago, shortly before Andy Green took ThrustSSC supersonic.
Enter the ghost of Run 56.
The ghost of Run 56
On 15 October 1997 Andy Green blasted twice across the Black Rock desert in Nevada in ThrustSSC to create the world’s first supersonic Land Speed Record at 763 mph. A record which of course stands to this day.
These runs were not a jump-in-and-floor-it exercise – very far from it. The Thrust team made many runs, working up the speed in small and sometimes nail-biting increments, sort of almost incidentally setting a new LSR of 714 mph in the process, 20 days before the final supersonic runs. In the logbook of Thrust SSC, the final supersonic record was runs 65 and 66.
In the subsequent blaze of publicity, the team were very open about the problems they had encountered – among them being a somewhat disconcerting tendency for the car to swerve off to the left passing 600 mph IAS (Indicated Air Speed), or about Mach 0.85. It was a chimera – it happened on every run, but with varying degrees of severity. It happened enough so that one homo sapiens named Andy Green learned to anticipate it and be ready for a cat-like and sometimes full-lock steering correction.
One cool dude, this Andy Green. My plans to kidnap him and drive BLOODHOUND myself remain well in hand – but in retrospect, he was welcome to ThrustSSC, which truth to tell was never entirely the most directionally stable of record cars. Its side-by-side twin engines dictated that the tandem rear wheels did the steering – except that space constraints then prevented them being in actual in-line tandem, so that the front wheel of the not-quite-tandem was to the right of the rear. Seemed like a good idea at the time – in fact more or less the only idea in town which fitted all the aerodynamic constraints – but a Land Speed Record car with rear-wheel steering like a fork lift truck…?
It was, to be blunt, a bastard to keep straight. I think I might have found regular sideways excursions at 600 mph a trifle fraying on the nerves after a while.
Especially on run Number 56.
When you are steadily increasing the speed of a car to Mach 1 you are most obviously on a learning-curve, instruction manuals on the subject being ever so slightly non-existent. So you – the design team – analyse the results of each run and make changes. Most of them fairly small, but occasionally somewhat more drastic.
Before Run 56, the team made a decision which came under the heading of at least ‘fairly drastic’. (In fact it was one of the few issues which ever caused a major row within the team, requiring all Richard Noble’s skills of tact and diplomacy – a not-always bottomless pit – to set right). Anyway, to cut a long story short, the team locked the active rear suspension in the fully extended position.
Here I must explain.
When operating, the active suspension jacked the rear wheels up or down over a range of about nine inches, thus altering the rear-end ride height and thereby the angle of attack of the whole car. It was hydraulically actuated, programmed to react according to the speed of the car, and had an emergency back-up system in case of hydraulic failure.
All fine and dandy – but as experience of running the car increased (which experience included a for-real hydraulic failure, fortunately at a lower speed) it became apparent that if the hydraulics packed up the emergency back-up might take a second or two to kick in. And in that second the back end of the car could drop – something akin to a quick snatch-back on the stick of an aeroplane. And should this happen maybe passing say Mach 0.95, the changed angle of attack could cause the front end to lift…
Now this is a very, very serious matter in any LSR car. To be brutally frank, if the front end lifts up then the only real questions are the selection of hymns at the funeral.
After that decision to lock up the active suspension – and at the same time make a change to the tailplane incidence – on Run 56 ThrustSSC lurched to the left passing 600 mph with such ferocity that A Green, not exactly a shrinking violet in these matters, instantly slammed the engines back to idle and aborted the run.
Andy Green has a masterful gift of understatement, frequently delivered with a most suspiciously deadpan face. In answer to one of my questions he says, “I was temporarily unable to control the precise line of travel, but there was no indication that the car would diverge uncontrollably”.
Oh, goody. That’s all right, then……
Well, not all right. Of course not all right. The team pored over the traces of Run 56 and decided that locking the active was altogether too much of a good thing. That it was producing so much down-force on the front wheels – creating some six tons of load on each wheel – that both wheels had broken through the desert crust, the left wheel rather more than the right, causing the yaw. So they made changes, re-activating the active suspension but with about half its former travel, so that even if it failed it wouldn’t (quite) initiate a moon-shot.
It worked – sort of -ish. It was right – sort of -ish. What hadn’t fully clicked at the time was that altering the F/R ratio – the difference between front to rear wheel loadings – was in itself creating directional instability if you put too much weight on the front.
That’s the sort of thing you find out in record-breaking. Sometimes you only really work it out it afterwards. Then some of the cleverest road car designers in the world quietly raise an eyebrow and stroll off to the Gents, and you never even know how much of an intellectual present you’ve given them.
Anyway. After the re-mods ThrustSSC then reverted from being impossible to keep straight to merely being an absolute bastard to keep straight.
And twelve days and ten runs later A Green wound it up to the supersonic record.
At which point, after six highly-stressed weeks on the Black Rock Desert, the ThrustSSC team very reasonably took a spot of R & R. The expression ‘went out on the lash’ is perhaps a bit inelegant for such an august body of persons, but suffice it to say that the small town of Gerlach, Nevada, experienced a sudden upsurge in beverage sales, along with A Green riding a large motorcycle through several bars with his girlfriend on the back.
We now come to a period which is a wee bit hazy. The technical records of ThrustSSC’s runs were preserved in their entirety, of course – but even five, never mind 10 or twelve years on, computer programmes had changed so much that running the old SSC data became difficult – a bit like running an old black-and-white movie in a modern digital cinema. Not to mention that back in ’97 acoustic vibration and other factors were jiggling sensors in Thrust like beans in a maraca, so that what seemed to make sense when you were in that time and place and dealing with it every day can now come over a wee bit hieroglyphic when you look back on it.
Nonetheless, people did investigate the records. In the late ‘nineties Australian academic Graham Doig ran ThrustSSC through his own Computational Fluid Dynamics programme – then much advanced from the CFD analysis available at the time of Thrust development – and concluded that the left-swing arose from a mixture of shockwave and airflow affect between the asymmetric rear wheels at around Mach 0.85. He may have been right, but with Thrust a distant memory and BLOODHOUND not yet a gleam in anybody’s eye the only people with real interest were fellow academics like Ron Ayers.
So now cometh BLOODHOUND.
And now cometh a new look at ThrustSSC’s records.
And now – all these years later – cometh a kinda salient point.
Namely, that one lateral accelerometer – sideways G-meter, if you like – recorded 0.74 lateral G during the excursion to the left on Run 56. The other lateral accelerometer at the other end of the car was blurred by vibration. So there is just this one trace…
Of a lateral side-load of 0.74 G.
Aaah…
0.74 G. Just when you were planning a 0.8 lateral G limit for BLOODHOUND, and feeling happy that you’re providing a 1.5 safety factor or something like it…
Well, maybe you aren’t. Just maybe you aren’t providing this safety margin…
A story with no end – yet
All the best stories are supposed to have a beginning, a middle, and an end. Well, sorry about that, folks, but this one doesn’t have an end.
Yet.
It will have, certainly – but not quite yet.
If I was a different kind of writer I would dramatically proclaim the news that ThrustSSC’s 0.74 lateral G excursion flabbergasted the BLOODHOUND team and caused smacking of foreheads and rending of shirts.
Of course it did no such thing.
For one thing it wasn’t new news, the broad facts of Run 56 being well-documented and known by all the team. No – it was more a sort of re-emergence of the issue. John Davis, BLOODHOUND’s Senior Control Systems Engineer and a man who can make a computer sit up and buy a round of drinks, re-studied the old Thrust data and was able to come up with a pretty certain pinpoint of the G actually involved. So no rending of shirts.
But a few somewhat thoughtful expressions…
Predictably, perhaps, it was the legendary Chief Aerodynamicist Ron Ayers who was the first to comment. He suggests that up to about 300 mph wheel-grip does the steering, but beyond that other forces start to take over. It further seems – incredibly to me, but there it is – that the speed of sound in desert mud playa is faster than the speed of sound in air, so that in the transonic and supersonic speed regions the pressure-wave just in front of the wheels pulverises (or in Ron-speak ‘liquidises’) the surface a nano-second before the wheels get there. Which means the wheels could never generate (or again in Ron-speak ‘react’) a 0.74 lateral G force at 600 mph, simply because they’re now running on liquidised playa which wouldn’t provide that much physical grip. Andy Green feels there was a fair bit of grip – indeed, possibly even too much at the front given the de-stabilising affect of altering the front/rear axle loads – but short of hauling ThrustSSC out of Coventry Transport Museum and running it again, there is no real way of measuring it.
Well, clearly, I dunno.
Ron’s speculation is that beyond about Mach 0.85 the aerodynamics now have considerable ascendancy over pure ground grip. And that aerodynamics could account for a 0.74 G side-thrust…
Well, I dunno again, personally having the specialist subject-knowledge of a slightly retarded newt. Certainly the wheel-tracks left by ThrustSSC on Black Rock Desert bear him out. You have to see the photographs of the run-tracks to believe what you’re seeing. Up to around 300 mph you see clean wheel-marks. After that the tracks become increasing more disturbed until up around the transonic region it looks like the ground just exploded and left a cart-track behind it…
And so what has now come to be called ‘The Event’ by the BLOODHOUND team has perked them up and made them pay attention.
Ben Evans, the team’s Computational Fluid Dynamics Guru, is now in the process of running ‘full vehicle’ tests on ThrustSSC. ‘Full vehicle’ means what it says on the tin – full vehicle – but back in ThrustSSC’s design days the computing power to do ‘full vehicle’ did not, for all practical purposes, exist. So the car was cut down the middle for CFD analysis. So the CFD was only looking at one side…
Which, of course, would not have revealed any airflow or shockwave oddities created by the asymmetric layout of the not-quite-tandem rear steering wheels…
Ah…
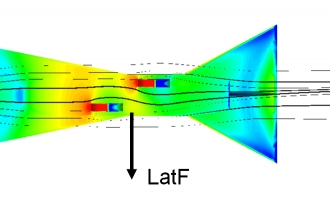 Preliminary Ben Evans CFD analysis of ThrustSSC behaviour at Mach 0.8. If the LatF (Lateral Force) looks the wrong way, remember you're looking up at the bottom of the car, not down from the top
Preliminary Ben Evans CFD analysis of ThrustSSC behaviour at Mach 0.8. If the LatF (Lateral Force) looks the wrong way, remember you're looking up at the bottom of the car, not down from the top
The interesting bit, though, is that Ben Evans’ preliminary CFD investigation is somewhat contrary to the results of Aussie Graham Doig’s some years back. Ben’s initial analysis is that as speed rises through the transonic, the ‘slot’ between ThrustSSC’s rear wheels creates a ¾ of a ton lateral force to the right at something over Mach 0.8 which, as the wheels lose grip on the surface with speed, would swing the tail out to the right which will obviously cause a yaw to the left. And Ben’s initial analysis is that this side-force would continue to increase as the speed increases to Mach 1.0.
Whereas Doig’s conclusion was that the side-force peaked at about Mach 0.85, and then subsided – which matched the car’s actual behaviour on Black Rock Desert.
Well, well, research is research. And research is continuing…
And could all this affect BLOODHOUND? Well, no, yes, and no, yes.
Firstly no, because BLOODHOUND doesn’t have anything like the rather weird asymmetric rear-wheel steering set-up of ThrustSSC. As Richard Noble said a few days ago in (for him) most uncharacteristic jargon-ese, “This would appear to be a ThrustSSC-specific issue”.
Secondly yes, because the aerodynamic steering and desert fluidisation theories, if true, could indeed have a bearing on BLOODHOUND.
Thirdly, no again, because it is practically impossible to imagine what that bearing might be. BLOODHOUND has to have four wheels – period. It has to steer – period. So what are you gonna change?
Fourthly, yes again – one thing hindsight suggests is that increasing the load on the front and reducing the load on the back of any LSR car intrinsically reduces directional stability, which is NOT – particularly says Andy Green – a ThrustSSC-exclusive issue, but what he describes as a major take-home point for BLOODHOUND. And Andy does kind of have what one famous test pilot described as ‘deep carnal knowledge’ of the issue……
Certainly none of this is any sudden revelation to anybody on the BLOODHOUND team. The problems are there and the last of them have yet to be solved.
But it is a kind of wake-up call. A focus.
The ghost of Run 56 will be with the team for a while yet.